線形システムと多項式行列 syslin
線形システムの状態空間表現の多項式行列 :syslinの使い方について。
システム方程式が線形の場合には線形時不変(linear time varying system)となり
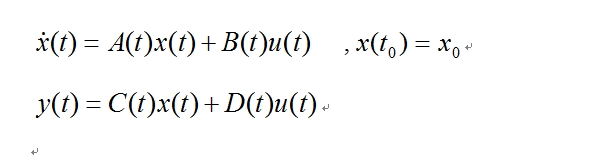
と表されます。
ただし、 A(t):システム行列、 B(t):入力行列、C(t) :出力行列、 D(t):直達行列、
x(t) 状態変数ベクトル、u(t) 入力変数ベクトル、y(t) 出力変数ベクトルである・
システム係数行列(system coefficient matrix) A(t),B(t),C(t),D(t)が,時不変の場合には線形時不変(linear time-invariant system)と呼ばれ

と表されます。ここで、A,B,C,D の係数行列は定数行列です。
多項式行列 :syslin
線形システムはsyslinを用いて定義します。
[sl]=syslin(dom,A,B,C [,D [,x0] ])
A,B,C,Dは状態空間表現の行列です。 (D はオプションで,デフォルトでは ゼロ行列となります)。プロパーでないシステムでは,D は多項式行列となります。
x0はベクトル (初期状態量; デフォルト値は 0)です。
syslin はリストとして線形システムを定義して, データの整合性を行います。ここで、
dom はシステムの時間領域を指定で,連続時間システムの場合dom=’c’, 離散時間システムの場合 dom=’d’ です。
【プログラム】
1.s=poly(0,’s’)
2.H=(1+2*s)/(2+3*s+s^2)
3.S1=syslin(‘c’,H)
【実行結果】
–>H=(1+2*s)/(2+3*s+s^2)
H =
1 + 2s
———-
2
2 + 3s + s
–>S1=syslin(‘c’,H)
S1 =
1 + 2s
———-
2
2 + 3s + s
多項式の線形システムの状態空間表現となります。
【2.線形システムを定義】
1.s=poly(0,’s’);
2.A=[0,1;0,0];B=[1;1];C=[1,1];
3.S1=syslin(‘c’,A,B,C) //線形システムを定義
【実行結果】
–>S1=syslin(‘c’,A,B,C) //線形システムを定義
S1 =
S1(1) (state-space system:)
!lss A B C D X0 dt !
S1(2) = A matrix =
0. 1.
0. 0.
S1(3) = B matrix =
1.
1.
S1(4) = C matrix =
1. 1.
S1(5) = D matrix =
0.
S1(6) = X0 (initial state) =
0.
0.
S1(7) = Time domain =
c
行列A,B,C,D,X0(初期値),時間領域を表示します。
線形システムはsyslinを用いて定義します。
A,B,C,Dは状態空間表現の行列です。
ボード線図を表示するときには、syslinを用います。
